






















Die Chirurgen stehen bei der Behandlung von Gehirntumoren vor einem Dilemma: Sie können entweder mittels Magnetresonanztomographie (MRT) ultrahochauflösende Bilder vom Tumor machen oder den Tumor mit ultrapräzisen chirurgischen Werkzeugen entfernen, aber beides gleichzeitig ist nicht möglich. Zumindest bisher. Heute arbeitet Professor Greg Fischer vom Worcester Polytechnic Institute (WPI) an der Entwicklung eines Operationsroboters, der für den Einsatz innerhalb eines MRT-Geräts konzipiert ist.
Dieser Roboter wird durch Echtzeit-Feedbacksignale geführt und kann eine energiereiche, interstitiell fokussierte Ultraschallsonde exakt am Tumor positionieren. Dies führt zu optimalen chirurgischen Ergebnissen und bietet dem Patienten einen größtmöglichen Nutzen. Natürlich war es nicht gerade einfach, einen Roboter zu bauen, der auch unter dem Einfluss der in einem MRT-Scanner herrschenden starken Magnetfelder störungsfrei arbeitet, doch mit der hoch entwickelten Steuerungstechnik und den piezoelektrischen Positionierern von FAULHABER hat das WPI-Team ein System geschaffen, das die MRT-Behandlungsmöglichkeiten zu revolutionieren verspricht.
Die Entwicklung von chirurgischen Geräten steckt voller Herausforderungen. Solche Systeme müssen exakte und reproduzierbare Ergebnisse mit ultrahoher Auflösung liefern. Zudem dürfen Sie keine elektrischen Störgrößen produzieren. Vor allem aber müssen sie zuverlässig sein. Im Fall des MRT-Roboters wurde Fischers Team mit der zusätzlichen enormen Herausforderung konfrontiert, alle diese Eigenschaften in einem System zu vereinen, das auch in Magnetfeldern von mehreren Tesla funktioniert.
Das starke Magnetfeld, das von einem MRT-Scanner erzeugt wird, macht selbst kleine ferromagnetische Objekte wie Schrauben zu Gefahrenquellen, ganz zu schweigen von Positionierungskomponenten wie Permanentmagnetmotoren, Getrieben und Aktoren. So war von Anfang an klar, dass für den MRT-Roboter kein herkömmliches Antriebsprinzip in Frage kam. Die Lösung war ein piezoelektrisches Gerät.
Piezoelektrische Aktoren basieren auf einem piezoelektrischen Keramikmaterial, das sich bei Anlegen einer elektrischen Spannung ausdehnt. Das Problem ist, dass die durch diesen Piezoeffekt hervorgerufene Auslenkung nur einen Bruchteil eines Prozents der Bauteilgröße beträgt, während der MRT-Roboter einen linearen Verfahrweg von bis zu ca. 100 mm oder eine kontinuierliche Drehung um 360 Grad erforderte. Die Lösung fand das WPI-Team in den Piezo-LEGS-Motoren von FAULHABER.
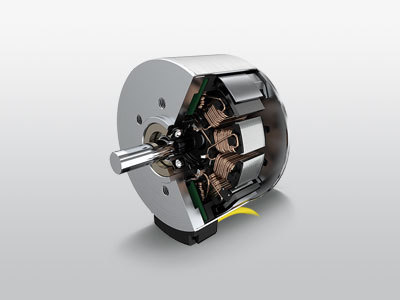
Diese Baugruppen bestehen aus einer Reihe von bimorphen Biegewandlern, die so angeordnet sind, dass sie sich bei Anlegen einer Spannung leicht biegen und ausdehnen.
In der Praxis werden sie als abwechselnde Paare so angesteuert, dass sie eine Antriebsstange in Nanometerschritten mit Geschwindigkeiten von bis zu 15 mm/s „durchreichen“ (oder im Fall einer Rotationsbewegung eine Scheibe in eine entsprechend schnelle Drehung versetzen). Da eine Reihe von Piezoelementen zu jedem Zeitpunkt Kontakt mit dem Aktor hat, sind diese Aktoren eigensicher (d.h. sie erzeugen im stromlosen Zustand eine Bremswirkung), wobei die Motoren eine Blockierkraft (Haltekraft?) von bis zu 10 N haben.
A voltage applied to the biomorphic legs causes them to bend and extend or retract, allowing them to move a drive rod forward.
Der WPI-Roboter besteht aus einem Modul für Translationsbewegungen in X-, Y- und Z-Richtung sowie zwei Modulen für Rotationsbewegungen, die den Bogenwinkeln eines Kopfrahmens entsprechen. Künftige Ausführungen werden zusätzliche Freiheitsgrade haben, was das Einführen und Drehen von Kanülen und Führungsstäben ermöglicht.
Zum Erzeugen der linearen Bewegung verwendet das WPI-Team eine Kombination aus Piezo-LEGS-Linearmotoren in einem Direktantrieb zum Einführen von Nadeln und Piezo-LEGS-Drehmotoren als Antrieb für Aluminiumspindeln. Zum Erzeugen der Drehbewegung kommen Riemenscheiben, die kundenspezifisch im 3D-Druck hergestellt werden, sowie gummi- oder glasfaserverstärkte Steuerriemen zur Anwendung.
Obwohl die bewegten Massen klein sind, tritt bei den verwendeten Materialien eine höhere Reibung als in herkömmlichen Lösungen auf, was bedeutet, dass sie zum Erzeugen von Bewegungen ein höheres Drehmoment erfordern, und das wird von den Piezomotoren geliefert. „In zahlreichen Anwendungen kommt man mit einem Piezomotor und einem Direktantrieb oder mit einer Riemenscheibe mit einer niedrigen Untersetzung zurecht,“ erklärt Fischer. „Man braucht keine Untersetzungsverhältnisse in der Größenordnung von 100:1, wie es bei einem kleinen DC-Motor erforderlich wäre.“
Die Piezo-LEGS erwiesen sich als die richtige Lösung für das WPI-Projekt. „Es gibt piezoelektrische Aktoren, mit denen sich Verfahrwege von vielleicht gerade einmal 1 mm erzielen lassen,“ so Fischer weiter. „Benötigt man größere Werte, dann beschränkt sich die Auswahl der Anbiete











