





















Grasping with appropriate pressure, without damaging or dropping objects, feeling and exploring the shape and texture of an object: Healthy people do this hundreds of times a day without having to think about it. But these movements are a complex sequence. Reproducing them artificially is a challenge that a research team has now successfully achieved for the first time with the LifeHand 2 project – supported by miniature motors from FAULHABER.
When you follow sporting championships for people with disabilities, such as the Paralympics, you're amazed at the high level of prosthetics available today. For example, in the summer of 2014, German long jumper Markus Rehm was not allowed to travel to the European Athletics Championships because the German federation feared that his carbon-fiber prosthetic leg would give him an advantage over able-bodied athletes during takeoff. And yet, these sophisticated prostheses made of carbon and other materials have one crucial disadvantage:
The wearer cannot truly use it like the lost limb. For example, commercially available hand prostheses detect muscle movements in the stump and allow the wearer to open and close their hand and grasp objects. However, without feedback of sensory information to the nervous system, the wearer cannot feel what they are trying to grasp and must constantly keep an eye on their prosthesis to avoid crushing objects.
The LifeHand 2 project represents a significant step forward. This artificial hand offers the wearer fascinating possibilities: they can grasp objects with adjusted pressure and sense their texture via touch sensors. The wearer can even feel precisely which fingers are in contact with the object. The size and weight of the prosthesis are comparable to those of a natural hand. The LifeHand 2 is equipped with sensors that detect touch by measuring the tension in the artificial tendons and controlling finger movement. This data is converted into electrical signals that are transmitted to the nerves. This is made possible by electrodes attached to the nerve fibers, which carry signals to the wearer's brain. A computer translates the sensor signals into impulses that the nerves can interpret. These impulses are then transmitted via electrodes to the median nerve and the ulnar nerve.
An international research team at the École Polytechnique Fédérale de Lausanne (EPFL) has developed the bionic hand prosthesis. Six research institutions from Italy, Switzerland, and Germany participated. Professor Silvestro Micera and his team from the Scuola Superiore Sant'Anna (SSSA) in Italy developed the sensory feedback system, which allows patients to feel sensation again when touching and moving objects.
In February 2013, a prototype of the LifeHand 2 was tested in a clinical trial at the Gemelli Hospital in Rome, under the supervision of Paolo Maria Rossini. Dennis Aabo Sørensen from Denmark volunteered as the first test subject for the LifeHand 2. He had lost his left hand in an accident nine years earlier. Four microscopic incisions were made in the main nerves of his left arm. After the electrodes were surgically implanted and the wounds had healed, the prosthesis could be connected. When Sørensen touched objects, the prosthesis's sensors generated information that was processed by a computer and transmitted via a stimulator to the electrodes implanted in the nerves and ultimately to his brain. All of this happened in less than 100 milliseconds. At such minimal time intervals, humans perceive no delay in the transmission. Sørensen was able to recognize the shape, consistency, and position of objects in real time and use this information to grasp them with the correct grip and force by controlling his fingers.
The research team was surprised by how quickly Sørensen learned to control the prosthesis. For the tests, the researchers blindfolded Sørensen and then asked him to grasp objects with the LifeHand. He was able to control the strength of his grip and describe the shape and texture of the objects, even though he couldn't see them.
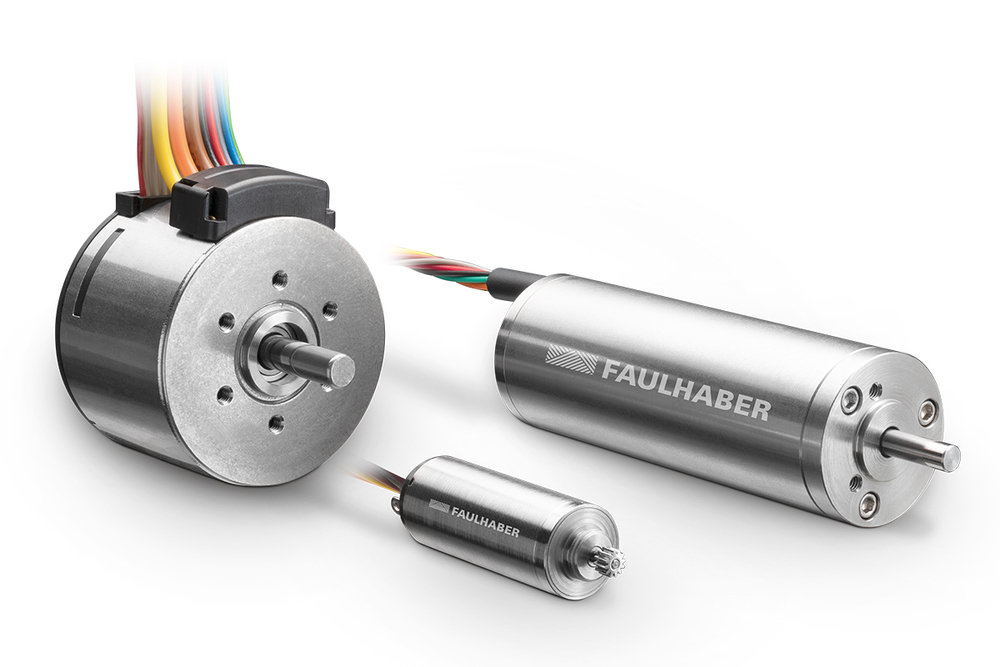
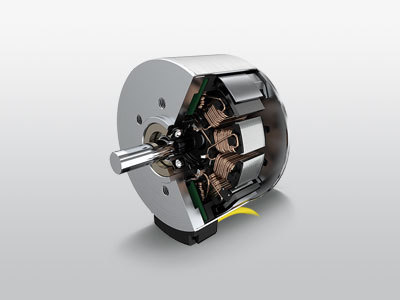
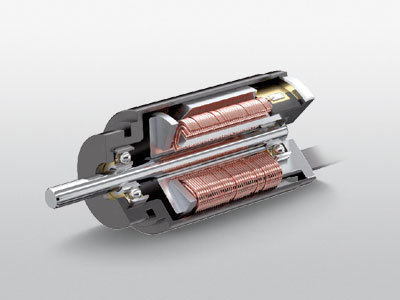
The delicate work performed by the thumb and fingers of the LifeHand is carried out by miniature DC motors from FAULHABER. With a motor diameter of 13 millimeters and a motor length of 31 millimeters, these motors are lightweight and compact. The special feature of FAULHABER DC motors is their rotor, which is not wound on an iron core, but rather consists of a self-supporting, skew-wound copper coil.











